
Revolutionizing Robot Grasping with 1M-HUGS: How Human Grasping Data is Transforming Robotics
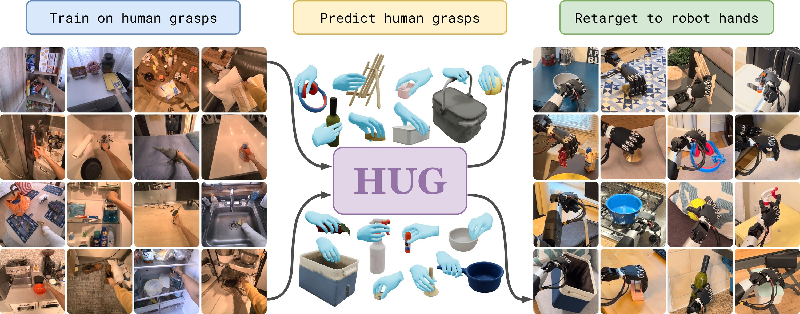
Imagine a robot that can effortlessly pick up a wide range of everyday objects just like a human can. This inspired researchers from New York University, Tsinghua University, and the University of Michigan to develop a groundbreaking system called HUG (Human Universal Grasping). Through innovative data collection and modeling techniques, this research addresses the significant challenge of enabling multi-fingered robots to grasp objects as naturally and effectively as people do.
The Challenge: Bridging the Gap Between Human and Robot Dexterity
While humans are adept at grasping a variety of objects—whether it’s a banana, a bottle, or even a pair of scissors—current robotic systems still struggle with this fundamental task. These multi-fingered robots often lack the extensive grasping data that humans accumulate in their daily lives, leaving them unable to adapt to new situations.
Many existing solutions involve synthetic data generation or tedious teleoperation, both of which have limitations. HUG, however, brings a fresh perspective by harnessing real human grasping experiences to teach robots.
Innovative Data Collection: The 1M-HUGS Dataset
The researchers behind HUG collected 1,000,000 egocentric human grasps captured with smart glasses in diverse settings, amounting to a staggering 27.8 hours of footage from over 6,700 instances across 41 different buildings. This unique dataset provides a rich, varied source of real-world grasping behavior that robots can learn from.
The process involves using calibrated RGB-D cameras to capture depth information alongside RGB imagery, allowing the researchers to create a dataset that is contextually rich and offers insights into the intricate details of human hand movements.
Flow-Matching Model: Making Sense of Grasp Data
The core of HUG utilizes a flow-matching model that combines RGB and depth data to predict diverse human-like grasps. By inputting a single RGB-D image, the model can generate a grasp that includes wrist translation, wrist rotation, and hand pose. The beauty of HUG lies in its ability to retarget these predicted grasps to various robot hands without needing extensive retraining for each specific embodiment, thus achieving what the researchers refer to as "zero-shot grasping."
Benchmarking Success: HUG-BENCH
To evaluate the effectiveness of HUG, the team established HUG-BENCH, a simulated benchmark comprising 90 unseen objects spanning various geometric categories and sizes. In a sequence of extensive tests across different environments, HUG outperformed state-of-the-art grasping methods, achieving a remarkable 66.7% success rate in tabletop settings and 62.0% in more cluttered, 'in-the-wild' environments.
This performance improvement of up to 34% compared to existing models demonstrates HUG’s ability to generalize across different robot embodiments and household environments seamlessly.
Implications for the Future of Robotics
The research not only showcases the potential for HUG to enhance robotic dexterity but also sets a precedent for integrating human behavioral data into machine learning frameworks. With further advancements and larger datasets, the ability for robots to adapt to novel objects and environments could revolutionize industries ranging from manufacturing to healthcare and beyond.
As this study continues to push the boundaries of robotics, the implications are vast, and the path toward making robots as dexterous and adaptable as humans appears increasingly achievable. The release of the code, data, and benchmarks on the project’s website provides an essential resource for future research in robotic grasping and manipulation.
For more information, visit grasping.io.
Authors: {Kevin Yuanbo Wu, Tianxing Zhou, Isaac Tu, Billy Yan, Irmak Guzey, David Fouhey, Dandan Shan, Lerrel Pinto}





